欢迎您访问深圳市易博达科技有限公司网站,公司主营载摄像头/车载录像机/车载显示屏/货车监控系统/盲区监测系统/4G车载视频监控管理平台/车载周边产品
全国咨询热线: 13510706870



 360全景系统
360全景系统
产品特点:
H8AI是一款针对大车盲区开发的是一款针对大车盲区开发的360度全景度全景影像+主动安全行车辅助系统,产品集成了AI视觉盲区检测,视觉盲区检测,CAN通讯,车速传感器传感器、16雷达探头、车外声光警报器、车内外声光警报器、车内盲区指示灯+蜂鸣器+ +语音播报功能,通过自有算法,实现全景影像(360)+盲区盲区检测(BSD)+变道辅助((LCA)功能,实现大车360度无死角的主动行车安全辅助系统.
规格参数:
规格参数 | 产品型号: | EA-H8AI |
电气参数 | 产品功耗 | 整机功耗10-30W工作电压DC12-36V。 |
电源防护 | 有防浪涌功能,防反接功能,低电保护,短路过载保护。 | |
视频输出接口 | AHD视频输出【选配】 | 支持,标准GX12-4P母头,两路AHD25_720P/1080P输出(360全景画面,可接部标机、MDVR)。 |
CVBS视频输出 | 支持,标准GX12-4P航空母头,支持PAL/NTSC制式。 | |
VGA视频输出 | 支持,标准DB15母头,内置DC12V稳压供电,串口通讯功能;选配我公司屏幕,无须额外的供电,安装更方便。 | |
HDMI视频输出 | 支持,专用HDMI接口输出,内置DC12V稳压供电,串口通讯功能;选配我公司屏幕,无须额外的供电,安装更方便。 | |
视频输入接口 | AHD视频输入 | 8路1080P_AHD像机输入,标准GX12-4P航空公头,DC12V稳压供电。 |
AI盲区预警功能 | AI视觉预警功能 | 360度环视系统,内置AI视觉算法,支持全车360度盲区检测功能: 系统通过驾驶室内显示器(视觉)+盲区(BSD_LED)指标灯(光)+智能语音播报喇叭(声),对司机提供【图像+光+声音】三位一体的提醒功能,同时联动控制车外声光警报器提醒进入盲区的行人或非机动车,全方位提高行车安全。 |
超声波雷达 | 雷达预警功能 | 产品支持四方向16探头的超声波雷达,结合车速传感器,自有算法,与360全景实时通讯,在全景界面相结合,雷达信息直观的显示在360车模上,支持增强的右侧盲区(BSD)检测,支持变道辅助(LCA)功能,雷达与声光警报器联动,实现盲区报警功能。 |
雷达主机 | 单套雷达主机标配4个大车专用雷达探头,4条2.5-5米探头延长线,1条与360主机通讯线。 | |
探测距离 | 四方向探测距离均为2.5米,熄火设防时,全部为0.3米。 | |
电源参数 | 供电电压DC12-33V,最大功耗0.2W。 | |
防水等级 | 整机防水等级为IP67。 | |
雷达功能 | 用于车辆盲区(BSD)+变道辅助(LCA)+泊车辅助等功能,结合公司自主的算法与协议,实现各种复杂的场景应用。 | |
雷达接口 | GX12-6P航空公头,通过一转二线转成4个GX12-4P母头,支持4个方向,每个方向1个主机加4路探头,一共支持16路探头。 | |
CAN通讯功能 | 功能与特性 | 高速CAN总线收发器,符合ISO11898标准,低功耗管理,网络唤醒功能。 |
存储功能 | 2.5英寸HDD存储 | 支持SATA接口的2.5英寸HDD或SSD存储。容量128G-2TB。 |
SD_CARD存储 | 标准SD_CARD存储功能,支持8-512G。 | |
声光警报功能【选配】 | 规格参数 | 供电电压DC12-36V,最大功耗3W,防护等级IP65,音量1米内≤105dB,16级音量可调,RS485通讯,支持最多10种声音。 |
物理规格 | 产品尺寸 | 长*宽*高=105*178*50(单位:毫米)。 |
产品重量 | 主机重量:0.65KG;整机:2.9-4KG(重量区别在于线束长短)。 | |
摄像头参数 | 像机电压 | DC8-16V。 |
像机功耗 | 单个像机0.5-1W。 | |
分辨率 | AHD1080P。 | |
工作/存储温度 | 工作温度:零下30℃~+70℃;存储温度:零下40℃~+85℃。 | |
视频帧率 | 采集帧率25 FPS/秒。 | |
防水等级 | IP68。 | |
低照度 | 0.01 Lux。 | |
振动/冲击 | 符合MIL-STD-810F, Method 516.5 | |
水平角度 | 210度 | |
垂直角度 | 126度 | |
光圈 | 1.6±5% | |
焦距 | 1.5MM | |
录像参数 | 视频格式 | H265 |
录像分辨率 | 4路加一起1920*1080P。 | |
文件容量 | 1.25GB/小时。 | |
主机参数 | IP防护等级 | IP51。 |
工作温度 | 零下20~70℃。 | |
存储温度 | 零下40~80℃。 | |
振动/冲击 | 符合MIL-STD-810F, Method 516.5。 | |
机身材料 | 机身,优质铝合金,表面氧化拉丝工艺。 |
主机后面板接口定义:
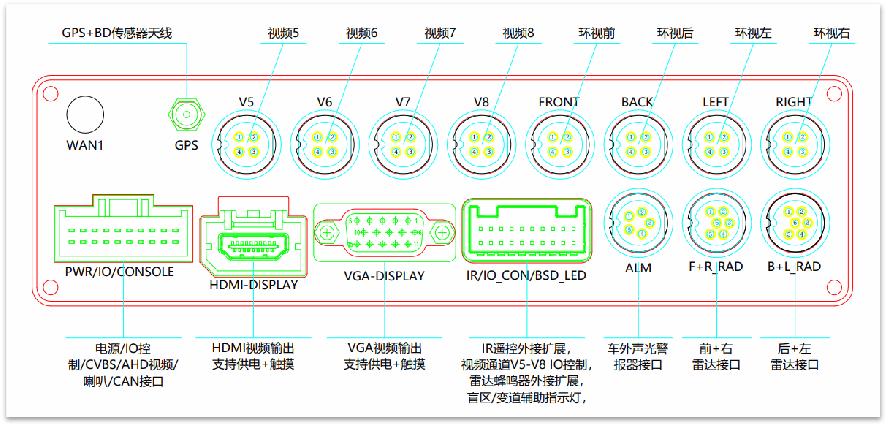
电源/IO控制/CVBS/AHD视频/语音喇叭/CAN接口
1 | 3 | 5 | 7 | 9 | 11 | 13 | 15 | 17 | 19 |
ACC+ 点火开关 | BATT+ 系统常电 | GND 电源地 | AHD1-OUT 视频输出 | AHD2-OUT 视频输出 | CVBS-OUT 视频输出 | DVD-COM 切换控制 | 左转向灯 检测 | 右转向灯 检测 | 倒档检测 |
2 | 4 | 6 | 8 | 10 | 12 | 14 | 16 | 18 | 20 |
CAN-H | CAN-L | SPK+ 喇叭正极 | SPK- 喇叭负极 | 视频地 | ILL+ 夜间检测 | BRAKE- 驻车检测 | DC12V 稳压输出 | RXD 串口接收 | TXD 串口发送 |
l BATT+(12-33V)(黄色)360常电(必接)
把汽车锁匙置于OFF档,测电笔一端搭铁,一端接要测试的线,测电笔亮,则为常电。
特别强调,常电要接在受原车总电源控制的线上,以免长时间不用车,导致汽车电池漏电。
常电不接的话,主机不工作,停车监控功能无法使用,停车设防功能不可用。
l ACC+_DET (IN)(红色)点火开关控制线,检测线电压范围10-33V (必接)
把汽车锁匙置于OFF档,测电笔一端搭铁,一端接要测试的线,测电笔灭,此时将汽车锁匙旋转一档(ACC档),测电笔亮,则为ACC。
ACC高电平时,系统开机,低电平关机。
l GND地线,(黑色)搭铁线 (必接)
直接与车身搭铁。
l ILL+_DET(IN) (橙色) 夜间模式检测线,检测线电压范围10-33V (选接)
把汽车锁匙置于ON档,测电笔一端搭铁,一端接要测试的线,打开原车小灯开关,测电笔亮,关闭原车小灯开关,测电笔灯灭,则为ILL线。
夜间检测线为高电平时,系统会启动夜间模式状态,降低显示器的亮度,降低车外声光警报器音量到50%。
以上四根线,常规在原车的收音机主机后面都有
l BACK+_DET (IN) (紫色)倒车火线
把汽车锁匙置于ON档,测电笔一端搭铁,一端接要测试的线,挂上倒档,测电笔亮,倒档取消,测电笔灭,则是倒档控制线。
倒车火线为高电平时,系统会切换到倒车模式,优先级别最高,360会显示:“全景+后视”画面。
l LEFT+_DET (IN) (白色)左转向灯线
把汽车锁匙置于ON档,测电笔一端搭铁,一端接要测试的线,打开左转向灯开关,测电笔灯与转向灯频率一致,一亮一灭,就是左转向灯。
在左转状态时,系统会切换到左转向模式, 360会显示:“全景+左视”画面。
l RIGHT+_DET (IN) (白色),右转向灯线
把汽车锁匙置于ON档,测电笔一端搭铁,一端接要测试的线,打开右转向灯开关,测电笔灯与转向灯频率一致,一亮一灭,就是右转向灯。
在右转状态时,系统会切换到右转向模式, 360会显示:“全景+右视”画面。
驻车状态,双闪状态下,系统会切换到4分割画面模式, 360会显示:“左+右+前+后”画面。
行车状态,双闪状态下,系统会切换到路涯模式, 360会显示:“全景+左前+右前”画面。
l BRAKE-_DET (IN) (粉色) 驻车(气刹)检测线
把汽车锁匙置于ON档,测电笔一端搭铁,一端接要测试的线,放下手刹,注意看原车仪表上的手刹灯P灯信号,灯灭,表示手刹松开了,测电笔灯亮,拉起手刹灯灭,就是手刹线。
特别强调,大车手刹都是气刹,当车车辆气缸的气压不足时,手刹放下时,P灯会一直亮,手刹不会释放开来,此时应该把车辆启动打气,再尝试。气刹传感器一般在汽刹管上,沿着手刹气管就可以找到。
驻车检测线是360 盲区识别功能+雷达功能的控制线,当驻车检测线悬空时,表示车辆为驻车状态,此时盲区识别功能+雷达功能将关闭;驻车检测线为高电平时,表示车辆为行车状态,此时盲区识别功能+雷达功能开启。
没有盲区识别功能,没有选配雷达功能的产品,此线可以不接。
确实找不到驻车检测线的时候,要将此线接到ACC ,否则盲区识别功能,雷达功能为关闭状态。
l CAN_H 总线高(橙色), CAN_L 总线低(粉色)
把汽车锁匙置于ON档,用万用表一端搭铁,一端接要测试的线,CAN电压一般为2V多一点,CAN线通常是双绞线,高低在一起的,CAN-H CAN-L两者的电压都是2V多一点,稍为高一点的电压为CAN-H,低一点的为CAN-L。
l DVD_COM (IO2) (OUT) (绿色) H8主机的时候是360视频输出控制线,H9是IO2检测脚。
在H8主机时,360视频有输出时,此线会有高电平输出,控制安卓车机切换成全景画面,低电平的时候控制安卓车机关闭全景显示。
在H9系统中,是IO2检测口,可在软件中自定义此脚的功能应用。
l 360_RXD (IO3) (绿注黑) H8主机的时候是主机串口接收口,H9是IO3检测脚
在H8主机时,为360串口接收脚。
在H9系统中,是IO3检测口,可在软件中自定义此脚的功能应用。
l 360_TXD (IO4) (白注黑) H8主机的时候是主机串口发送口,H9是IO4检测脚
在H8主机时,为360串口发送脚。
在H9系统中,是IO4检测口,可在软件中自定义此脚的功能应用。
l LCD_PWR (橙色) (360-AHD1/DVR-CVBS_OUT)和(360-CVBS_OUT) 航空头的供电脚
(360-AHD1/DVR-CVBS_OUT)和(360-CVBS_OUT) 航空头的1脚与LCD_PWR脚并一起,当这个脚接了电源时,这两个视频输出的航空头就支持供电。默认此线不接,因为视频输出可能会接到其它主机上,如果1脚带供电,就是造成烧坏设备。
产品安装实例,像机与雷达安装位置图解

雷达探测距离与蜂鸣器工作状态&雷达产品规格参数
前雷达探测距离2.5米 | 雷达A (蜂鸣器/360) | 雷达B(蜂鸣器/360) | 雷达C(蜂鸣器/360) | 雷达D(蜂鸣器/360) |
红色区域(0.0-0.8米) | 快鸣 / 360显示红色 | 快鸣 / 360显示红色 | 快鸣 / 360显示红色 | 快鸣 / 360显示红色 |
黄色区域(0.81-1.6米) | 无 / 360显示黄色 | 中鸣 / 360显示黄色 | 中鸣 / 360显示黄色 | 无 / 360显示黄色 |
绿色区域(1.61-2.5米) | 无 / 360显示绿色 | 无 / 360显示绿色 | 无 / 360显示绿色 | 无 / 360显示绿色 |
后雷达探测距离2.5米 | 雷达A (蜂鸣器/360) | 雷达B(蜂鸣器/360) | 雷达C(蜂鸣器/360) | 雷达D(蜂鸣器/360) |
红色区域(0.0-0.8米) | 快鸣 / 360显示红色 | |||
黄色区域(0.81-1.6米) | 中鸣 / 360显示黄色 | |||
绿色区域(1.61-2.5米) | 低鸣 / 360显示绿色 | |||
左雷达探测距离2.5米 | 雷达A (蜂鸣器/360) | 雷达B(蜂鸣器/360) | 雷达C(蜂鸣器/360) | 雷达D(蜂鸣器/360) |
红色区域(0.0-0.8米) | 中鸣 / 360显示红色 | |||
黄色区域(0.81-1.6米) | 无 / 360显示黄色 | |||
绿色区域(1.61-2.5米) | 无 / 360显示绿色 | |||
左雷达探测距离2.5米 | 雷达A (蜂鸣器/360) | 雷达B(蜂鸣器/360) | 雷达C(蜂鸣器/360) | 雷达D(蜂鸣器/360) |
红色区域(0.0-0.8米) | 中鸣 / 360显示红色 | |||
黄色区域(0.81-1.6米) | 无 / 360显示黄色 | |||
绿色区域(1.61-2.5米) | 无 / 360显示绿色 | |||
使用注意,遇到如下图所示的物体时,会影响探测效果:
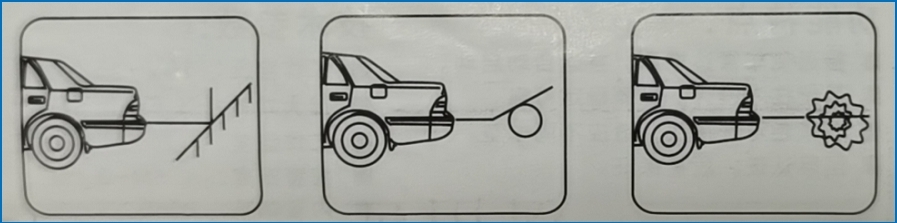
特别说明:
l 雷达安装高度不低于0.6米,雷达角度平行于地面或稍微向上;
l 遇到暴雨,探头有污垢,会影响探测效果,或出现误报;
l 不同的物体会有不同的探测距离,多辆安装雷达的车一字排开时,可能会引起雷达误报。
雷达产品规格参数
规格参数 | 产品型号: | 超声波雷达 |
超声波雷达 | 雷达主机 | 一个主机标配4个雷达探头,GX12航空头接口,一条与360主机通讯线,360主机支持雷达功能,雷达主机需要单独选配,直接接上就可以用。 |
探测距离 | 四方向探测距离均为2.5米,熄火设防时,全部为0.35米。 | |
电源参数 | 供电电压DC12-36V,最大功耗0.2W。 | |
防水等级 | 整机防水等级为IP67。 | |
雷达功能 | 用于车辆盲区(BSD)+变道辅助(LCA)+泊车辅助等功能,结合公司自主的算法与协议,实现各种复杂的场景应用。 | |
通讯接口 | RS232,波特率19200。 | |
物理规格 | 产品尺寸 | 长*宽*高=100*130*29(单位:毫米)。 |
产品重量 | 主机重量:0.4KG;整机:2.9-4KG(重量区别在于线束长短)。 |
 产品展示
产品展示 在线咨询
在线咨询 13510706870
13510706870

